1. 概览
本文介绍了一个轻量、异步的快照算法,Flink就是基于这个算法,实现了一致性快照和exactly-once的特性的,并保证执行快照时计算的低延迟、高吞吐。
该算法主要概览:
- 轻量、异步
- 快照只包含算子的状态,适用的数据流拓扑结构为无环图,也适用于有环图(利用下游备份)
本算法的一个关键基础是 Chandy & Lamport 的快照算法,其关键的思想就是插入barrier marker。详细可参考:
- 论文阅读: Distributed Snapshots Determining Global States of Distributed Systems
- 原文:https://dl.acm.org/doi/abs/10.1145/214451.214456
2. Apache Flink
Apache Flink是一个可用于批和流处理的计算系统。
Flink中,流/批处理计算由一系列相连的有状态任务组成的,因此Flink会将任务编译成一个有向图:
- 顶点代表一个有状态任务,根据输入维护自己的状态,并向下游输出数据流
- 数据流在顶点之间的边上传输
2.1. 流处理模型
Flink API中,数据流被抽象为DataStream:
- 支持很多算子(如
map,filter,reduce)以生成新的DataStream - 算子支持并行化,这基于
DataStream分区
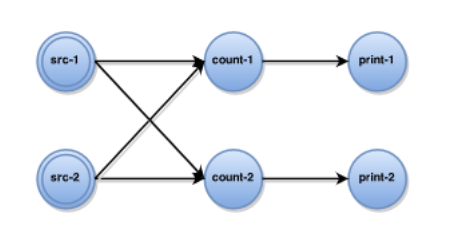
一个增量计算单词个数的例子
代码:
拓扑结构:
2.2. 分布式数据流执行
上面的例子已经展示了一个流处理计算会被编译成一个有向图$G = (T, E)$:
-
$T$:表示计算的任务,对于某个顶点$t \in T$,它是一个算子的独立执行实例,并包含
- $I_{t}, O_{t} \subseteq E$:输入和输出
- $s_{t}$:状态
- $f_{t}$:用户自定义函数
顶点消费输入的数据,更新算子状态,并根据自定义函数生成并输出数据。
-
$E$:表示任务之间的数据通道
-
$M$:任务间传输的所有记录集合。
3. Asynchronous Barrier Snapshotting
3.1. 问题定义
全局快照:$G^{} = (T^{}, E^{*})$
- $T^{}$:记录所有$t \in T$的状态$s_{t}^{}$
- $E^{}$:记录了所有通道$e \in E$中所有在途的数据$e^{}$
算法满足下面2个特性
- 可终止:若所有进程存活,算法最终会在有限时间内完成
- 可行性:这包含很多含义,最主要的,快照保持了因果顺序
3.2. 无环图ABS
基本思想:周期性在source端插入barrier marker。
- barrier marker会从
source传到sink - 通过传播,快照被一步一步的构建出来
算法假设:
-
网络基本可靠:保证FIFO顺序,可阻塞也可非阻塞(阻塞时数据在缓冲,不被发送)
- 任务可操作通道:操作有
block,unblock,send,broadcast - 在
source端,输入被放入Nil的输入通道
那么算法的伪代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
struct Task {
input_channels, // 输入通道集合
output_channels, // 输出通道集合
state, // 状态
udf, // 用户自定义函数
blocked_input_channels, // 阻塞的输入通道集合
// ...
}
// 初始化
fn init(input_channels, output_channels, fun, init_state) {
self.input_channels = input_channels;
self.output_channels = output_channels;
self.udf = fun;
self.state = init_state;
self.blocked_input_channels = Set::new();
}
// 接收数据后的回调
fn event_recv(input_channel, msg) {
// 计算新状态并得到输出数据
(new_state, output_records) = self.udf(msg, self.state);
// 更新状态
self.state = new_state;
// 输出到下游
for (out_record, out_channel) in output_records {
send(out_channel, out_record);
}
}
// 接收barrier marker的回调
fn event_recv_barrier(input_channel, barrier) {
if input_channel != Nil {
// 将输入通道阻塞
self.blocked_input_channels.add(input_channel);
block(input_channel);
}
if self.blocked_input_channels == self.input_channels {
// 若输入通道全部阻塞
// 清空集合
self.blocked_input_channels.clear();
// 广播barrier到所有下游(所有输出通道)
broadcast(self.output_channels, barrier);
// 做当前节点的快照
snapshot(self.state);
// 解除阻塞输入通道
for input in self.input_channels {
unblock(input);
}
}
}
可终止:这是基于无环图的算法,由于无环图必定有一个拓扑排序,当排序的最后一个顶点完成快照后,快照算法必定会结束。
可行性:而网络通道的FIFO特性和可阻塞性,保证了快照的可行性,维护了因果顺序。
该算法和 Chandy & Lamport 快照算法非常像(就是传播Snapshot的第一个分支),很容易得知,最后得到能得到快照$G^{} = (T^{}, E^{})$,且$E^{} = \emptyset$。
3.3. 有环图ABS
对于有环图,3.2.的算法就会有死锁的问题,且不能捕捉通道中的数据,有违“可行性”。
这里,有环图ABS算法在无环图基础上:
- 利用DFS,找到有向图$G$的back-edge集合$L$(这样$G = (T, E-L)$就是一个无向图了)
- 进行下游数据的备份,备份的下游数据是在创建快照时,从back-edge中收到的数据
- 对于一个任务$t$,它有一个输入back-edge集合$L_{t}$。$L_{t}$会创建备份日志
- 日志记录从$L_{t}$收到的数据,范围:
- 开始:任务$t$传播barrier marker到下游开始
- 结束:收到$L_{t}$的barrier marker
所以整个算法的伪代码如下,解释可看下面的注释:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
struct Task {
input_channels, // 输入通道(包含back edge)集合
output_channels, // 输出通道集合
loop_input_channels, // back edge输入通道集合
marked_input_channels, // 标记(收到barrier marker)的输入通道集合
state, // 状态
state_copy, // 某个时刻状态的拷贝,快照存储的数据使用了该字段
udf, // 用户自定义函数
logging, // 是否在记日志
backup_log, // 日志列表
// ...
}
// 初始化
fn init(input_channels, backedge_channels, output_channels,
fun, init_state) {
self.state = init_state;
self.state_copy = Nil;
self.input_channels = input_channels; // 包含了back edge
self.output_channels = output_channels;
self.loop_input_channels = backedge_channels; // back edge input channel
self.marked_input_channels = Set::new();
self.udf = udf;
self.logging = false;
self.backup_log = vec![];
}
// 接收数据后的回调
fn event_recv(input_channel, msg) {
if self.logging && self.loop_input_channels.contains(input_channel) {
// 若打开了logging, 且输入的通道是back edge, 则要将数据添加到日志里
self.backup_log.append(msg);
}
// 计算新状态并得到输出数据
(new_state, output_records) = self.udf(msg, self.state);
// 更新状态
self.state = new_state;
// 输出到下游
for (out_record, out_channel) in output_records {
send(out_channel, out_record);
}
}
// 接收barrier marker的回调
fn event_recv_barrier(input_channel, barrier) {
// 收到barrier, 首先标记对应的输入通道
self.marked_input_channels.add(input_channel);
// 作差集, 获取非back edge的输入通道
let regular_input_channels = self.input_channels - self.loop_input_channels;
if input_channel != Nil && !self.loop_input_channels.contains(input_channel) {
// 若输入通道不是back edge, 将其阻塞
block(input_channel);
}
if !self.logging && self.marked_input_channels == regular_input_channels {
// 当所有的非back edge输入通道都被标记了, 即都被阻塞了
// 则开始记录back edge驶入通道的日志
// 并广播barrier到下游, 将取消之前通道的阻塞
// 注意,这里用‘==’是因为算法保证back edge永远是最后加入/标记的
self.logging = true;
// 注意这里保存了当前的状态拷贝, 它是本轮snapshot需要记录的状态
self.state_copy = state;
broadcast(self.output_channels, barrier);
for input_channel in self.input_channels {
unblock(input_channel);
}
}
if self.marked_input_channels == self.input_channels {
// 当所有的输入通道被标记, 且back edge也被标记
// 那么记录状态: (state_copy, backup_log)
// 前者是上面代码记录的拷贝, 代表日志记录前的状态
// 后者是self.logging开启后, 通过event_recv函数记录的日志
// 它可用来代表back edge上传输的消息快照, 因为state_copy不含back edge的数据影响
snapshot(self.state_copy, self.backup_log);
// 清空状态,关闭日志记录
self.marked_input_channels.clear();
self.state_copy = Nil;
self.backup_log.clear();
self.logging = false;
}
}
其实有环图ABS的算法,也是衍生自 Chandy & Lamport 快照算法(就是再加上Snapshot传播的第二个分支),本质上几乎是一样的。易知,最后得到能得到快照$G^{} = (T^{}, E^{})$,且$E^{} = L^{*}$。
可终止:每个任务$t$都能最终收到所有输入通道(包含back-edge)的barrier mark,且通过广播barrier mark将其传播到下游,直到所有任务都收到。死锁也避免了,这通过不阻塞back edge输入通道完成(这样就不会造成一个阻塞环了);
可行性:依旧是网络通道的FIFO特性来保证:
- 快照中的任务状态,即
state_copy,不包含收到barrier marker后的状态 - 快照中的下游日志是完整的,它的范围从$E-L$收到barrier marker开始,到收到$L$的barrier marker结束,这通过FIFO网络通信保证
4. 错误恢复
错误恢复有很多方法,最简单的是:
- 每个任务$t$读取快照$G^{}_{t} = (T^{}{t}, E^{*}{t})$
- 设置初始状态为$T^{}_{t}$,并重新执行日志$E^{}_{t}$,以恢复状态
- 重新开始接收上游数据
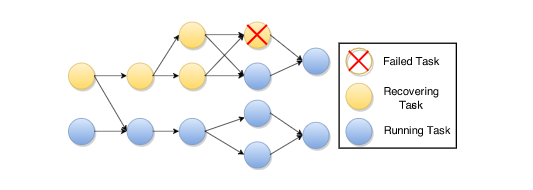
此外,子图恢复也是可行的:只要恢复失效任务$t$及其上游(到source)即可。如下图所示:
为了达到exactly-once语义,下游需要去重(以避免重计算)。去重可以通过标记序列号实现。
5. 总结
实际上,这篇论文提供的ABS算法实现,本质上和 Chandy & Lamport 快照算法是一样的。它其实只做了2个优化:
- 异步执行
- 降低要保存的快照数据量
- 无环图可不存通道上的数据
- 有环图只需存back-edge通道的数据
